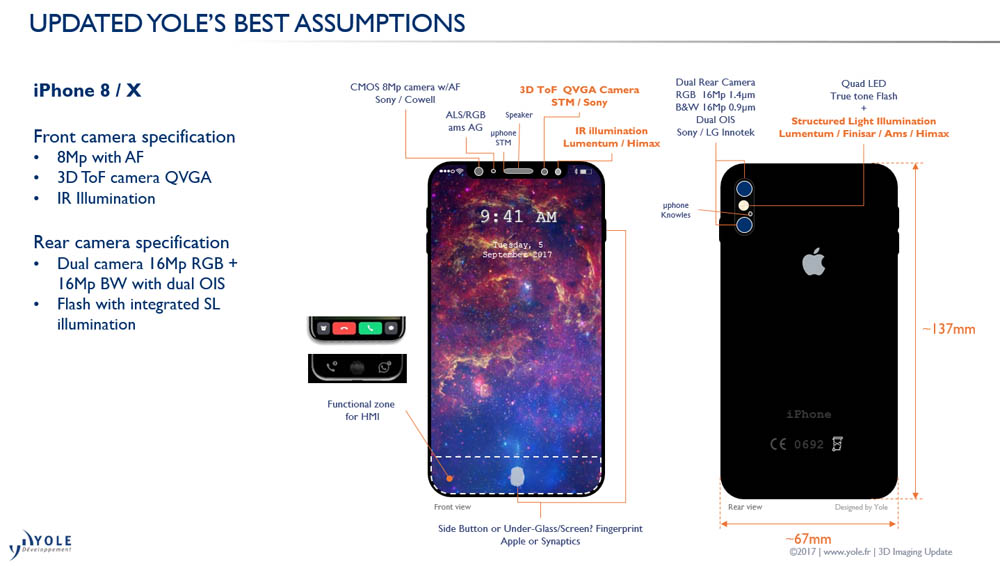
"Until earlier this year everyone thought 3D cameras would appear on the rear of Apple’s new iPhones, as is the case in the Lenovo Phab 2 Pro, in order to develop Augmented Reality applications. This changed radically when Ming Chi Kuo, an analyst from KGI Securities, confirmed in April 2017 that there would be a front 3D camera... Most analysts speculate that this camera would exploit “structured light”, because of Primesense’s involvement. However, Yole maintains its original idea of a Time of Flight (ToF) camera on the front due to the nature of the application, which is to be a new revolutionary user interface."

I do know that it's using a laser illuminator.
ReplyDeleteclaims are free. no one would come collect if they got it wrong (and they did).
ReplyDeleteI (think) I agree with Roi, the claim that a TOF will be used for (my added word) accurate Facial Recognition is ahead of it's time.
ReplyDeleteInfineon claims their large and medium priced solution is accurate to a mm, while STM's tiny and less expensive (which Apple has used previously) is accurate to a cm (neither as good for Facial Recognition as other solutions, but better for CPU).
Sources:
http://www.st.com/content/st_com/en/products/imaging-and-photonics-solutions/proximity-sensors/vl53l0x.html
Yole's recent Report: http://www.woodsidecap.com/wp-content/uploads/2017/07/Mobile-Depth-Imaging-Report-Final.pdf - see page 8, amongst others.
Cheap and tiny TOF is low resolution in XY&Z, Structured Light or two Cameras are better, but computationally expensive; using TOF to lower the computational expense of ultimately using 2 Cameras is possible, but not very TOF (pun intended, and essentially a 3 Camera solution).
ToF is not that computationally easy either. You need to blast out several phases and frequencies to avoid ToF unique artifacts of anti-aliasing and multipath, and those need processing on the 'host' to derive the depth map. And a set of gates can easily solve the SL computing load, as Primesense amply demonstrated. ToF by nature can be noisy in the Z dimension, do note, relative to SL or Stereo.
ReplyDelete